gnuplotで副軸(第二軸)を使用する方法です.
スクリプトに以下のように記載します.
set ytics nomirror # 第一y軸の目盛は左側のみにする
set y2tics # 第二y軸を描画することを指定する
set grid # 目盛線を描画することを指定
set xlabel "xxx" # x軸の見出しを指定(例では"xxx")
set ylabel "yyy" # 第一y軸の見出しを指定(例では"yyy")
set y2label "zzz" # 第二y軸の見出しを指定(例では"zzz")
2017年8月31日木曜日
2017年8月30日水曜日
[Mac] ベトナム語入力方式の追加
ベトナム語では,基本音のアルファベットに加えて声調をあわわすを付けます.
macOSでベトナム語を入力できるようにする手順を以下にメモします.
1. System Preference(システム環境設定)を立ち上げ,Keyboard(キーボード)を選択

 3. "+"マークをクリックすると,以下のようなウィンドウが開く.
3. "+"マークをクリックすると,以下のようなウィンドウが開く.
左側から"Vietnamese"を選択して,"Telex"を選択する.

今回は,"Telex"方式を選択しましたが,他にも方式が存在します(例えば,VNI入力方式は,母音の変化を数字キーで入力する).
日本語,英語,ベトナム語の入力を切り替える方法は,
command + space 長押し
でウィンドウが表示され,3つのIMEを切り替えることができます.
長押しではなく,普通に(短く)押すと直前のIMEとのトグルになります.
macOSでベトナム語を入力できるようにする手順を以下にメモします.
1. System Preference(システム環境設定)を立ち上げ,Keyboard(キーボード)を選択
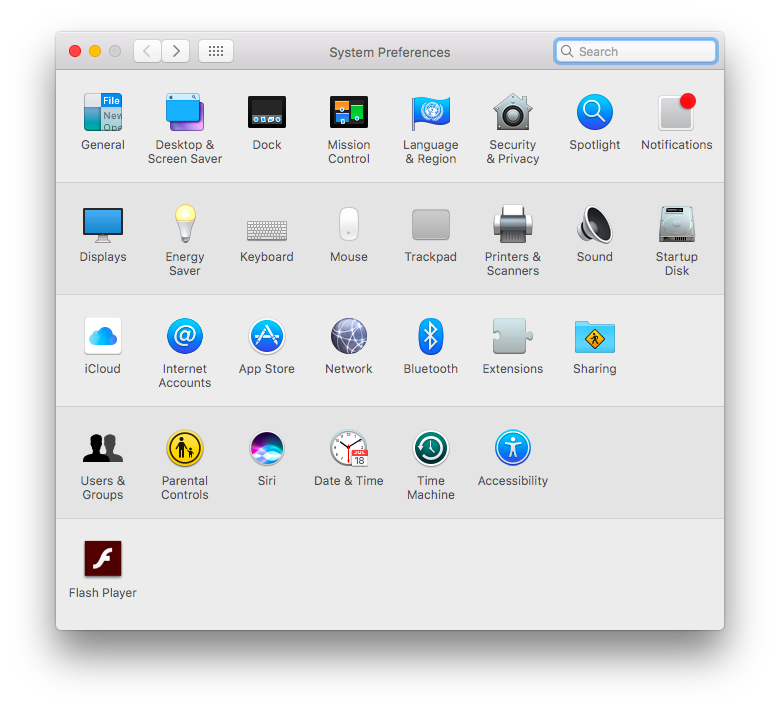
2. keyboardのタブから"input source"のボタンを選択(クリック)

左側から"Vietnamese"を選択して,"Telex"を選択する.

Telex入力方式では,補助記号は以下の方法で入力します.
No
|
char
|
input
|
description
|
1
|
a
|
a
|
通常のアルファベットはそのまま
|
2
|
ă
|
aw
|
a の上にカップ
|
3
|
â
|
aa
|
a の上にハット
|
4
|
đ
|
dd
|
d に横棒
|
5
|
ê
|
ee
|
e の上にハット
|
6
|
ư
|
uw
|
u の右肩にアポストロフィー
|
7
|
ô
|
oo
|
o の上にハット
|
8
|
ơ
|
ow
|
o の右肩にアポストロフィー
|
9
|
á
|
as
|
上げの声調記号 文字の上にシングルクォート
|
10
|
à
|
af
|
下げ声調記号 文字の上にバッククォート
|
11
|
ã
|
ax
|
波の声調記号 文字の上にチルダ
|
12
|
ả
|
ar
|
疑問の声調記号 文字の上にハテナっぽい記号
|
13
|
ạ
|
aj
|
重い声調記号 文字の下にドット
|
今回は,"Telex"方式を選択しましたが,他にも方式が存在します(例えば,VNI入力方式は,母音の変化を数字キーで入力する).
日本語,英語,ベトナム語の入力を切り替える方法は,
command + space 長押し
でウィンドウが表示され,3つのIMEを切り替えることができます.
長押しではなく,普通に(短く)押すと直前のIMEとのトグルになります.
2017年8月17日木曜日
NASAの"Exploring Drone Aerodynamics with Computers"
NASAがDJIのPhantom 3をモデルにして,クアッドコプターの空気運動のモデリングを行っています.以下は,その翻訳記事です.オリジナルはこちら
Simulation of the DJI Phantom 3 during flight. Airflow interactions are shown as undulating lines. Pressure changes are shown using color. Areas of high pressure are red; low are blue.
DJI Phantom 3の飛行中シミュレーション.気流の相互作用は波状の線として示されています.圧力変化は色調の変化で示されています。高圧の領域は暖色系で,低圧は寒色系です.
DJI Phantom 3の飛行中シミュレーション.気流の相互作用は波状の線として示されています.圧力変化は色調の変化で示されています。高圧の領域は暖色系で,低圧は寒色系です.
Credits: NASA Ames Research Center/NASA Advanced Supercomputing Division/Tim Sandstrom
クレジット:NASA アメス研究所 / NASA 先端スーパーコンピューティング部門 / ティム サンダース
クレジット:NASA アメス研究所 / NASA 先端スーパーコンピューティング部門 / ティム サンダース
For decades, NASA has used computer models to simulate the flow of air around aircraft in order to test designs and improve the performance of next-generation vehicles.
NASAは何十年もの間,試験設計や次世代の乗り物の性能向上のために,コンピューターモデルを用いて航空機の周囲の空気の流れのシミュレーションを行っています.
NASAは何十年もの間,試験設計や次世代の乗り物の性能向上のために,コンピューターモデルを用いて航空機の周囲の空気の流れのシミュレーションを行っています.
At NASA’s Ames Research Center in California’s Silicon Valley, researchers recently used this technique to explore the aerodynamics of a popular example of a small, battery-powered drone, a modified DJI Phantom 3 quadcopter.
最近,カリフォルニア州シリコンバレーにあるNASAのアメス研究所で,研究者達は小型のバッテリー駆動ドローンであるDJI Phantom 3(クワッドコプター)の一般的な例の空力特性を調査するためにこの(航空機の周囲の空気の流れのシミュレーション)技術を用いました
最近,カリフォルニア州シリコンバレーにあるNASAのアメス研究所で,研究者達は小型のバッテリー駆動ドローンであるDJI Phantom 3(クワッドコプター)の一般的な例の空力特性を調査するためにこの(航空機の周囲の空気の流れのシミュレーション)技術を用いました
The Phantom relies on four whirring rotors to generate enough thrust to lift it and any payload it’s carrying off the ground. Simulations revealed the complex motions of air due to interactions between the vehicle’s rotors and X-shaped frame during flight.
Phantomは4つの旋回ローターによって,地面から飛び立つのに十分な推力を生成します.シミュレーションによって,飛行中のローターとX字型フレーム間の相互作用による複雑な空気の動きが明らかになりました.
Phantomは4つの旋回ローターによって,地面から飛び立つのに十分な推力を生成します.シミュレーションによって,飛行中のローターとX字型フレーム間の相互作用による複雑な空気の動きが明らかになりました.
As an experiment, researchers added four more rotors to the vehicle to study the effect on the quadcopter’s performance. This configuration produced a nearly twofold increase in the amount of thrust.
実験として,研究者達はさらに4つのローターを機体に追加して,クワッドコプターのパフォーマンスへの影響を調査しました.この構成によって,推力はほぼ2倍に増加します.
The findings offer new insights into the design of autonomous, heavy-lift, multirotor vehicles for uses such as cargo transportation.
調査結果は,貨物輸送などの用途のための自律型,重量物運搬,およびマルチローター機体の設計に関する新しい洞察を提供しています.
調査結果は,貨物輸送などの用途のための自律型,重量物運搬,およびマルチローター機体の設計に関する新しい洞察を提供しています.
This research was presented at the 2017 American Institute of Aeronautics and Astronautics SciTech Forum in Grapevine, Texas, by Seokkwan Yoon of the NASA Advanced Supercomputing Division at Ames.
この研究は,テキサス州グレープバインで開催された2017年米国航空宇宙科学技術フォーラムで,アメスにあるNASA の先端スーパーコンピューティング部門のSeokkwan Yoonによって、発表されました。
この研究は,テキサス州グレープバインで開催された2017年米国航空宇宙科学技術フォーラムで,アメスにあるNASA の先端スーパーコンピューティング部門のSeokkwan Yoonによって、発表されました。
Author: Kayvon Sharghi
著者:ケイボン・シャルギ
著者:ケイボン・シャルギ
Last Updated: Aug. 7, 2017
Editor: Rick Chen
最終更新日:2017年8月7日
編集者:リック・チェン
最終更新日:2017年8月7日
編集者:リック・チェン
登録:
投稿
(
Atom
)